
|
|
文章詳情
控制系統的基本概念及機器人控制系統的分類方式 二維碼
1627
機器人控制系統是由控制裝置、機械手形式的受控對象、行走裝置(在可移動的機器人的情況下)以及其他一些裝置所組成。其它裝置是指那些屬于機器人,但結構上和操作上獨立的裝置。 由于控制機器人的主要任務是控制機械手,因此,下面介紹機器人控制系統時主要指的是機器人的機械手控制系統。如果控制機器人的其它裝置時,將會特別說明。控制機械手的基本原理同樣適用于控制機器人的其它裝置。 可作為控制系統分類依據的主要特征是: (1)控制運動的方式(程序控制系統、按照外界狀態而作用的控制系統,包括適應性系統及復合控制系統); (2)控制裝置的信號類型(連續作用系統和離散作用系統); (3)同時控制機器人的數目(單控系統和群控系統); (4)操作人員參與的特點(自動控制系統和自動化控制系統)。 下面根據這些特性進一步研究控制系統分類問題。 機器人控制系統按控制運動的方式分類: 根據這一特征,系統可分為程序控制系統,按照外界狀態作用的控制系統以及同時采用這兩種方式的復合控制系統。 圖1示出了**類系統,即程序控制系統的方塊圖。圖中受控對象即是機械手。給機械手的每個運動自由度的傳動系統施加控制作用,就可控制機械手,控制裝置包括時間程序裝置、信息變換器(變換由時間程序裝置送來的信息)以及執行裝置(它直接對機械手傳動裝置進行作用)。 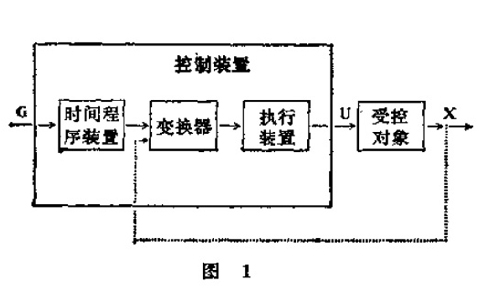 輸出量X表征受控對象的狀態。X是一個向量。它的各分量即是機器人機械手的各運動自由度的坐標。控制作用U簡稱控制,也是向量。控制作用由控制裝置加到受控對象(指機械手所有運動自由度)的輸入端。給定作用G簡稱給定。G包括輸出量X要求的(或給定的)變化規律X?(t)的信息。X?作為控制程序加給時間程序裝置。控制目的就是保證等式X(t)=X?(t)成立。這里X?是輸出量X的給定值,X?是以程序形式給定的時間函數。若機械手每個傳動裝置都完成實現相應運動自由度的給定程序,則機械手就可以完全實現相應運動自由度的給定程序,則機械手就可以完全復現所需求的空間運動。 程序控制機器人的典型實例是**代工業機器人,也就是幾乎所有現今業中采用的機器人。 編制程序(即圖1中的G)的方法有: (1)按機械手給定軌跡的坐標來編制程序; (2)按工業范圍內軌跡的坐標形式來編制程序。這就要求把這些坐標變換成機械手運動自由度的實時坐標。這種變換是由圖1所示的變換器完成的; (3)按標準的操作名稱(必須把完成操作的實際條件具體化)來編制程序,或者按操作順序來編制程序。這時,機器人控制裝置根據G值能夠自動計算出運動軌跡。為此,相應地要求有比較復雜的信息交換器(見圖1),甚至要用電子計算機。這時,可以在機器人開始操作之前進行軌跡計算,也可以在機器手傳動裝置執行程序的過程中進行計算。但是,這種計算應比機械手執行程序提前一定的時間。 有兩種計算機軌跡的方法,求**解的方法和在給定的范圍內求出一個允許解的簡單方式。 編制程序的方法不同,程序控制系統也不同。在一些控制系統中,通過計算機械手的運動軌跡來編制程序(可以在機器人之外計算運動軌跡,然后往時間程序裝置中順序地輸入程序;也可以在機器人本身的控制裝置內進行運動軌跡的計算)。在另外一些程序控制系統中,用示教法編制程序。所謂示教法就是:操作人員手控機器人或者是機器人的機械手由操作人員手動,使機械手產生機械位移,此時機器人完成所要求的動作,并把產生這個動作的控制作用(即信號)U記錄下來。 按運動自由度的運動形式,系統可分為連續運動系統和離散運動。連續運動系統中每一個運動自由度的運動軌跡是連續的。離散運動系統中每一個運動自由度的運動是由程序給定的、不連續的、有限的點位序列。 完成連續運動的系統稱為輪廓式控制系統。完成離散控制運動的系統稱為點位式控制系統。循環控制系統是點位式系統的最簡單方案。在這種系統中,機械手每個運動自由度的每一個坐標的程序點數目是起點和終點,有時再多幾個中間點。現時的點位系統能夠保證每個運動自由度由幾十個,甚至上百個程序點。 當一個機器人的每個運動自由度采用不同類型的控制系統時,這種系統稱為復合控制系統。 程序控制系統是最簡單的系統。但是,只有在完成操作(在要求的精度范圍內完成操作)的整個工作期間,工作條件完全確定和不變的情況下,才能采用這種系統。工作條件指的是外界環境、機器人本身的情況及控制目的。控制目的在機器人開始工作之前就應該完全確定下來。 機器人的程序控制系統可以是連續作用的或離散作用的開環控制系統和閉環控制系統。在閉環系統中輸出量X有反饋(如圖1中虛線所示)。在連續作用的系統中,不僅時間程序裝置,而且機器人的所有其它裝置都應是連續作用的。  |

臺州捷眾智能裝備有限公司 電 話: 0576-87110816 傳 真: 0576-87110816 手 機: 139-6765-7580 郵 箱: 180242@qq.com 網 址: www.gzfc168.cn 地 址: 浙江省臺州市玉環市清港徐斗工業區 | 捷眾智能裝備阿里巴巴 電 話: 0576-87110816 傳 真: 0576-87110816 手 機: 139-6765-7580 郵 箱: 180242@qq.com 網 址: jiezhongcnc.1688.com 地 址: 浙江省臺州市玉環市清港徐斗工業區 | 捷眾微信公眾號 |  掃一掃手機網站 |