
|
|
文章詳情
機械手的開合度和動力計算公式以及運動受力分析 二維碼
3537
機械手的開合度: 若僅以手臂的擺動來代替其開合及讓位,則手臂的開合度必須相應(yīng)增大,使得手頭足以退讓筒體的運動軌跡。 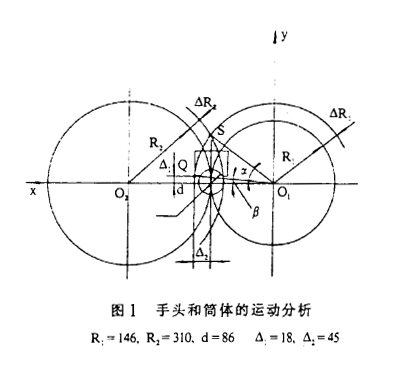 手頭和筒體的運動情況如圖1所示。根據(jù)圓的運動方程可以得到機械手中心與筒體中心的運動軌跡分別為: x?2+y?2=R?2 [x?-(R?+R?)]2+y?2=R?2 由圖1可以看出,手頭最易干涉處為Q點,而簡體最易干涉處為簡壁外緣,則其運動方程分別為: x?2+y?2=(R?+△R?)2 =(R?+△?)2+△?2 [x?2-(R?+R?)]2+y?2 =(R?+△R?)2 =(R?+d/2)2 由于R?+△?》△?,則式(3)可以簡化為 x?2+y?2=(R?+△?)2 將式(5)代入式(4),整理后得 x=(R?+R?)2+(R?+△?)2-(R?+d/2)2/2(R?+R?) 則 y=±√{(R?+△?)2-[[(R?+R?)2+(R?+△?)2-(R?+d/2)2]/2(R?+R?)]2} 代入相應(yīng)數(shù)值計算,得x=138.25,y=±131.79 則α=arctan|y|/x=arctan131.75/138.25=43.63° β=arctan△?/(R?+R?)=arctan18/(146+45)=5.38° 因此,手臂的最小擺動角度為 α'=α-β=43.63°-5.38°=38.25° 則機械手的最小計算開合度為2α',等于76.50°。 考慮到其計算偏差及構(gòu)件的制作誤差,為安全起見選取手臂的實際開合度為90°。 機械手的動力計算: 選用鉸支單活塞桿液壓缸,直徑Φ40毫米,引程75毫米。扭簧材料選用65Mn,工作扭頻1500~1860kg·mm,極限扭矩2200kg·mm,工作扭轉(zhuǎn)角度54°48'~68°。 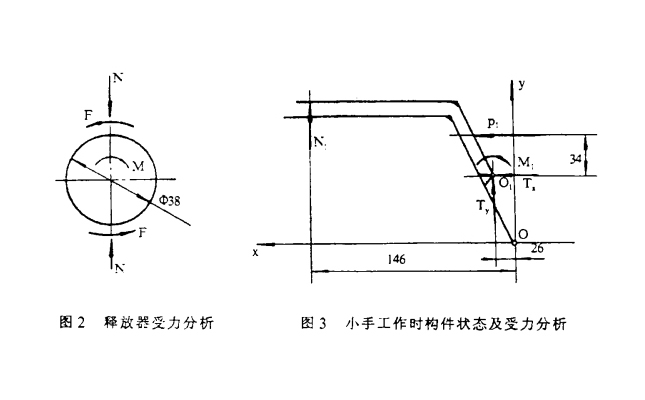 小手工作時的驅(qū)動力經(jīng)測算可得,釋放器端蓋旋入時的**扭矩為600kg?mm,由圖2釋放器簡體的受力分析可知,在**工作扭矩下筒壁的摩按阻力為 F=Mmax/d=600/38=15.79(kg) 此時所需的正壓力為 N=F/μ=15.79/0.15=105.26(kg) 小手頭夾緊釋放器小轉(zhuǎn)臂的受力情況如圖3所示。此時大、小手頭分別夾壓在保護(hù)筒和釋放器上,大、小轉(zhuǎn)臂之間有扭簧作用而產(chǎn)生扭矩,其受力平衡方程為 ΣMo?=P?·34-N?(146-26)-M?=0 因為N?=N 則p?=(M?+120N)/34=(1860+120×105.26)/34=426.21(kg) 液壓機無桿腔液壓油所需的壓強為 P?=P?/πr2=426.21/22·π=33.92(kg/cm2) 考慮到其安全性,油壓應(yīng)在40kg/cm2以上。 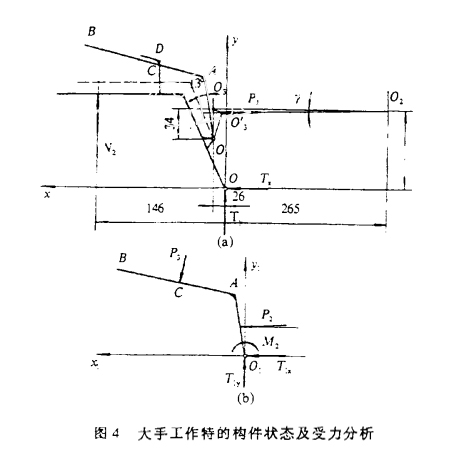 大手工件時的驅(qū)動力: 大手工作時的構(gòu)件狀態(tài)及受力情況如圖4(a)所示。由于大手頭夾緊保護(hù)筒,小手頭為退回狀態(tài),則小轉(zhuǎn)臂也隨之回擺一定的角度,這將使得液壓缸活塞桿對小轉(zhuǎn)臂力的作用點O?點移至O?'點,其力的作用線也將隨之轉(zhuǎn)動一定的角度7。 7=arctan34(1-cos13°)/265=0°11'18〞 取小轉(zhuǎn)臂O?AB的隔離體,受力狀態(tài)如圖4(b)所示。若要使小轉(zhuǎn)臂O?AB靠緊在擋板D上,則液壓驅(qū)動力P?對O?點的矩應(yīng)小于扭簧產(chǎn)生的力矩M?。設(shè)定液壓系統(tǒng)的工作壓強為3.2kg/cm2,則 P?(34·cos13°·cos7-34·sin13°·sin7)=1331(kg·mm) 小于扭簧的工作扭矩1500kg·mm。因此能夠可靠地工作。 由圖4(a)的受力分析,可以列出組合件的平衡方程 ΣMo=P?[(61+34cos13°)cos7-(26-34sin13°)sin7]-N?·146=0 大手頭對保護(hù)簡體的握持力為 N?=P?/146[(61+34cos13°)cos7+(26-34sin13°)sin7]=25.94(kg) 滿足手頭的導(dǎo)向要求。  |

臺州捷眾智能裝備有限公司 電 話: 0576-87110816 傳 真: 0576-87110816 手 機: 139-6765-7580 郵 箱: 180242@qq.com 網(wǎng) 址: www.gzfc168.cn 地 址: 浙江省臺州市玉環(huán)市清港徐斗工業(yè)區(qū) | 捷眾智能裝備阿里巴巴 電 話: 0576-87110816 傳 真: 0576-87110816 手 機: 139-6765-7580 郵 箱: 180242@qq.com 網(wǎng) 址: jiezhongcnc.1688.com 地 址: 浙江省臺州市玉環(huán)市清港徐斗工業(yè)區(qū) | 捷眾微信公眾號 |  掃一掃手機網(wǎng)站 |